introduction
Cross-sectional measurement refers to the operation of measuring the surface relief shape of the pile at the vertical direction of the center line. It is then drawn into a cross-sectional view for the design of subgrades, slopes, special structures, earthwork calculations, and construction stakeouts. Cross-section measurement must be carried out in the measurement of highways, railways, etc., due to the large roadbed width, high design accuracy requirements, and large vertical and horizontal section density, especially in places where the height difference of the hills or mountainous areas varies greatly and is inconvenient to walk. The traditional method is used to measure the density of the collection points, and the cross-section work efficiency is low. Once the line is changed, it needs to be re-fielded for measurement. The design cycle is long and cannot adapt to the current rapid development of the society.
In recent years, with the rapid development of China's economy, drones have shown a thriving scene in all walks of life, especially in the geographic information industry. UAV aerial photography is bringing a leap forward to traditional surveying and mapping methods. . As a professional measuring drone, PPK, image-free control technology, tilt photography technology enhances image positioning accuracy and elevation accuracy, while mainstream UAV processing software such as AgiSoft PhotoScan, PIX4D Mapper, Smart 3D Capture, etc. The image matches the point cloud function. As a new type of additional surveying and mapping products, point cloud data has great value in engineering measurement. This paper takes a highway surveying and setting project as an example, using Sirius free image-controlled drone aerial photography equipment, using ultra-high image ground resolution, using image matching point cloud technology and Lidar point cloud processing technology to obtain dense ground elevation data, and then Replacing the most time-consuming and labor-intensive section measurement of the road surveying process not only greatly improves the operating efficiency and reduces the production cost, but also greatly facilitates the road rerouting, arbitrary section design, and BIM system application.
1 drone image matching point cloud technology advantage
1.1 UAV image matching point cloud is the product of the times, born with the trend
Image matching problem has always been a hot topic in the fields of photogrammetry and remote sensing, computer vision, etc. Image matching technology is the key to realize the automatic search for the same name image point, realize the aerial triangulation calculation, and generate orthophoto. The use of traditional photogrammetry methods to obtain high-precision DEM data, although high precision, but time-consuming and laborious, huge workload, the use of radar point cloud method to generate DEM automation is higher, but the need to invest in high-cost professional Lidar equipment, data acquisition costs are very Expensive, which is the main reason why point cloud data applications are not popular. The UAV image matching point cloud technology combines the advantages of both traditional aerial photography and Lidar, and adopts a lightweight equipment with point cloud acquisition.
1.2 AgiSoft PhotoScan multi-view image matching technology enables rapid output of massive cloud data of drones
AgiSoft PhotoScan is a software that automatically generates high-quality 3D models of images. It is also the mainstream UAV image processing software. It does not need to set initial values ​​and does not require camera calibration. It performs any photo according to the latest multi-view 3D reconstruction technology. Processing, generating a three-dimensional model of real coordinates by giving control points. The entire workflow, whether it is image orientation or 3D model reconstruction, is completely automated. The high-precision Sirius UAV aerial mapping system MAVinci Desktop combined with AgiSoft PhotoScan software makes it easy to unattended one-click access to DOM, DEM and raw point cloud data.
1.3 MAVinci Desktop Aeronautical Mapping System Develops Flight Plan for Intelligent Management
MAVinci Desktop is a professional UAV flight control software that can prepare flight plans according to the scope of the survey area in advance, or create a flight plan by the operator to temporarily specify the target area and specify the desired GSD according to the survey area (see Figure 1). . The software can intuitively and efficiently perform a variety of missions from simple to complex, such as setting a strip flight plan that is consistent with the line engineering, covering the largest range of spiral flight plans within the line of sight, etc., where the adaptive terrain relief flight mode can Acquiring ultra-low altitude high-resolution ground images not only ensures a constant image overlap, but also lays the foundation for obtaining high-precision image matching point clouds.
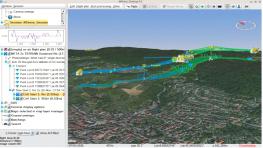
Figure 1 Band and adaptive surface relief flight mode
1.4 Sirius SIRUS Pro UAV boost image point cloud matching technology successfully applied in the production field
As a new type of low-altitude remote sensing image acquisition, UAV aerial survey is an effective supplement to traditional high-altitude aerial photography and low-altitude aerial image acquisition. It has the characteristics of fast response, high sensitivity, low cost of use and easy operation. Sirius SIRUS Pro UAV high-precision aerial mapping system, with RTK technology, RTK measurement while collecting photos, each photo has RTK fixed solution accuracy position information. By integrating precision time measurement and high-precision positioning technology, the Sirius drone can complete the traditional ground image control in the air. Even in the completely free image control mode, the positioning accuracy of 5cm can be realized, which ensures the relative positional relationship of the aerial space from the root source, and is also the basis for realizing high-precision image matching point cloud after the empty three encryption.
2. Engineering examples
2.1 Project Overview
This project is a cross-section measurement project for a certain highway in Laiwu City. The design distance of the route is 85km, the average elevation is 210m, the lowest elevation is 170m, and the highest point is 280m. Most of the survey areas are located in the micro hills and heavy hills, and the landforms are relatively fragmented; the surface of the survey area is dominated by sparse orchards and low-lying crops, and most of the areas are bare, which is advantageous for cloud noise removal from unmanned aerial vehicles. Technical requirements: According to the corresponding middle pile number, the cross-cut coordinates are collected, and the elevation coordinates of the upper and lower ridges must be collected at the terrain slope change.
2.2 Implementation method
The external aerial survey equipment adopts the Sirius free image-controlled drone, and the range of the survey area is imported into the MAVinci Desktop flight plan software. The GSD (ground sampling interval) is set to 3cm, and the strip flight plan and adaptive terrain relief mode are used. The height is 120m; the heading overlap is 80%, the side overlap is 65%; the average flight length is 3km, the bandwidth is 200m, and the battery life is 30min.
2.3 Detection method
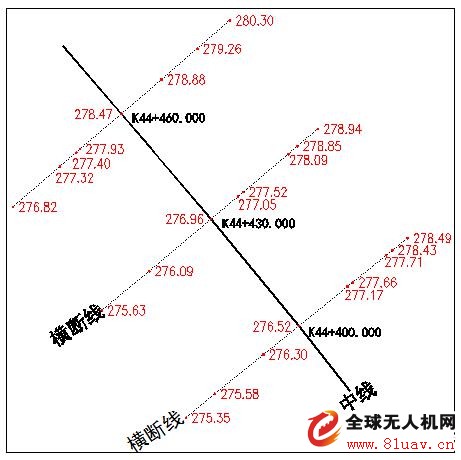
Figure 3 Traditional section measurement of ground elevation points
The Sirius UAV image matching point cloud technology has undergone multiple inspections and verifications in more than 1,000 kilometers of highway topographic map measurements, and the data has high credibility; this cross-section measurement is verified by traditional measurement methods, and manual acquisition lines are used. The length is 5km and the number of section points is about 14800 points. In this paper, only three sections are selected for ease of display, and more sections are similar (see Figures 3 and 4).
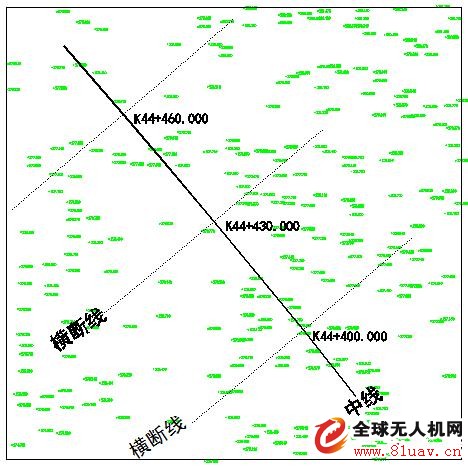
Figure 4 Using the drone to match the point cloud to obtain the ground elevation point
According to the superposition analysis of two cross-section lines (see Figure 5), it can be seen that the two cross-section lines are basically consistent, but there is a slight deviation. The main point of the cloud point is not completely consistent with the artificial measured point, and there are also trade-offs. It is also normal for the cross-section lines generated by the two methods to not completely match.
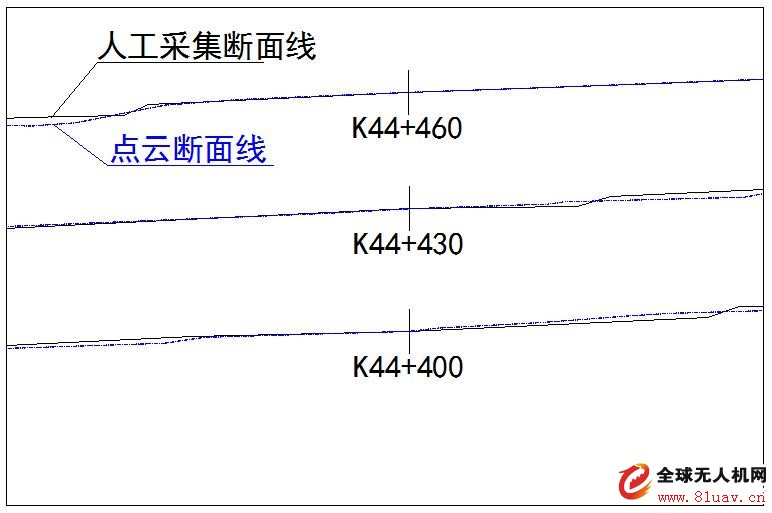
Figure 5 Two cross-sectional line overlay analysis
3 Earthwork calculation and accuracy analysis 3.1 Earthwork calculation
The DTM triangulation file is generated by the above two different data acquisition methods, and the CASS software DTM method is used to compare the earthwork calculation functions (see Fig. 6 and Fig. 7). The calculation result between the three sections of K44+400 to K44+460 is the excavation amount 366.6m3. The filling amount is 265.7m3, the balance of the filling and excavation is 99.9m3, the ground surface area is 3600m2, and the overall impact on the surface height is about 3cm; the detection range is expanded, and 30 measured sections of K44+220 to K44+500 and the drone matching point cloud For comparison, the calculation result is that the total excavation volume is 2723.8m3, the total filling amount is 2490.4m3, the excavation balance amount is about 233.4m3, the ground surface area is 21355m2, and the overall influence on the surface height is about 11cm.
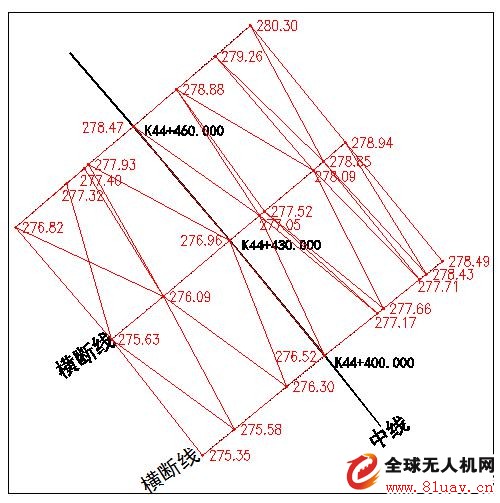
Figure 6 Creating a DTM grid using measured cross-section lines
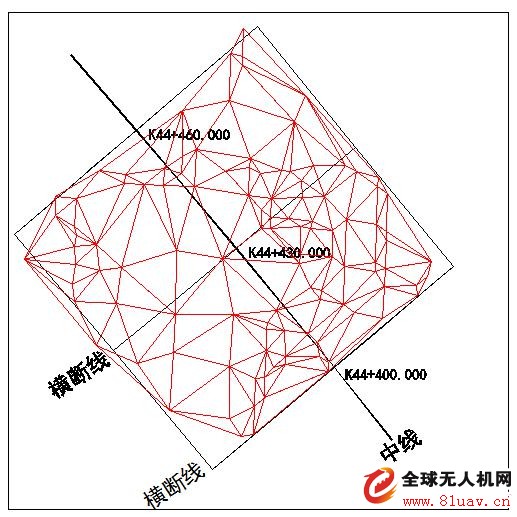
Figure 7 Using a point cloud to create a DTM grid
3.2 Section measurement plan comparison
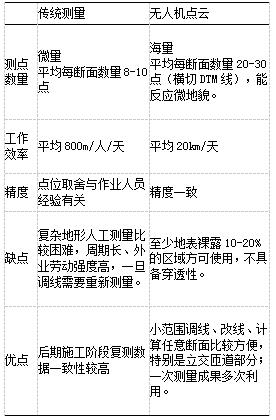
Because the above two methods of elevation point acquisition methods are completely different, the traditional section measurement has higher precision on the specified section line, but the lack of data between the two section lines to construct the DTM model is not high precision, the measurement accuracy and the ground line position section plus pile and The work experience of the operators is quite large; the drone matching point cloud method is more inclined to the square grid method, and the point cloud density is basically 2m*2m (the cloud density can reach 0.5m*0.5m on the bare surface). Very accurate earthwork results can be obtained with reliable point cloud accuracy (see Table 1: Cross-sectional measurement scheme comparison).
Table 1: Comparison of cross-section measurement schemes
4 Conclusion
The high price of onboard Lidar equipment and complex data processing processes constrain the user community and application direction. With the advancement of technology, point cloud acquisition is no longer the exclusive means of airborne Lidar, and civilian-priced drones can also be realized. Despite the different mapping principles, the accuracy of acquisition is not comparable to that of airborne Lidar. However, human-machine image matching point cloud technology has a very broad application prospect as a new technical means. However, its application has yet to be verified and improved through more cases, especially the need to further optimize the point cloud classification algorithm and reduce the difficulty of data processing [11]. The use of drone image matching point cloud instead of traditional section measurement can provide reference for similar engineering projects.
Coaxial Speaker,5 Inch Coaxial Speaker,Coaxial Speaker For Fullrange Box,Neodymium Coaxial Speaker
Guangzhou BMY Electronic Limited company , https://www.bmy-speakers.com