
IMU, Inertial Measurement Unit, is the inertial measurement unit. Today, IMU is not limited to professional navigation. Its application range covers a wide range of areas: military defense, aerospace, maritime and other fields, as well as daily WeChat positioning, smart phones, cars/trains, driverless, smart homes, etc. Will be used. The road to development of MEMS-IMU is based on the characteristics of traditional inertial devices. The combination of MEMS can greatly improve the shortcomings of traditional inertial devices. MEMS is an industrial technology that combines microelectronics and mechanical engineering. With the improvement of the silicon semiconductor process for making integrated circuits, the micromachined manufacturing technology of micromachines, microsensors and microactuators emerged in the 1980s. MEMS technology has become a reality product that meets the needs of different applications. According to the different requirements of MEMS-IMU accuracy, it can be divided into three categories: low precision, medium precision and high precision. (1) Low-precision MEMS-IMU InvenSense's ICM-20602 6-axis inertial sensor (3-axis accelerometer + 3-axis gyroscope) fully supports the requirements of Google Daydream and Tango, and can be mass-produced for Daydream certification. And Tango-compatible smartphones to build the VR/AR ecosystem. This is a successful case of low-precision MEMS-IMU applications. In summary, the low-precision MEMS-IMU is mainly used in consumer electronics products, and its application range is very wide, which can be used in mobile phones, game consoles, music players, wireless mice, digital cameras, hard disk protectors, smart toys, pedometers. , anti-theft system, etc. Combined with devices such as environmental sensors, it can realize functions such as hearing aids and motion sensing. The main requirements of this type of low-precision MEMS-IMU are: low unit price, small size and narrow temperature range.

Ying Meisheng ICM-20602 6-axis inertial sensor low-precision MEMS-IMU: Accelerometer is small in size, light in weight, low in power consumption, general measurement range 1~50g, resolution 2mg~10mg, gyroscope general range is ±300°/ s, the bias is in the range of 500 ° / h ~ 1000 ° / h. (2) Medium-precision MEMS-IMU Compared with low-precision MEMS-IMU, medium-precision MEMS-IMU is mainly used in automotive and industrial grade products. Among the automotive-grade products, the medium-precision MEMS-IMU can be used not only for GPS-assisted navigation systems, but also for vehicle electronic stability systems, automotive airbags, and vehicle attitude measurement. For example, the IMU can be used for high-precision positioning and the judgment of the car's own attitude. Even in the case of GPS signal loss or obstruction, the IMU can provide reliable information for the car, which ensures the car's active safety and is the key to autonomous driving. One of the components. For example, in the standard ESP of the car body stability system in recent years, IMU is one of the key components. The automotive grade can be used as a special product for industrial applications, and its reliability is high. At the same time, due to the large amount of demand, it is required to have a lower unit price than the general industrial requirements. In industrial grade products, medium precision MEMS-IMU can be used in precision agriculture, industrial automation, large medical equipment, robotics, instrumentation, engineering machinery and so on. Remember, is Atlas's high-end humanoid robot amazingly balanced? The magical robot that fell and can climb up on its own, thanks to its IMU in its strong balance. Speaking of inertial sensors used in the industrial field, most of them appear in the form of modules. For industrial grade chip-level products, they must be processed, including software and hardware circuits, and adaptability to different industrial environments. Most of them require moderate price. The accuracy requirements are superior to those used in consumer electronics.

Atlas high-end humanoid robot precision MEMS-IMU: Accelerometer range selection is 1~500g wide, resolution 1mg~3mg, gyroscope range is mostly within 250°/s, and zero offset is in range of 50°/h~200°/h Inside. (3) High-precision MEMS-IMU high - precision IMU can solve the deployment problem of inertial sensors in complex aerospace systems. For example, the IMU used in avionics systems is ADIS16485/8, which meets all performance and reliability objectives. High-precision MEMS-IMU is mainly used in military-grade and aerospace-grade products, requiring high precision, full temperature zone, and impact resistance. Mainly used in communication satellite wireless, missile seeker, optical sighting system and other stability applications, aircraft and missile flight control, attitude control, yaw damping and other control applications, as well as medium-range missile guidance, inertial GPS navigation and other guidance applications, remote Aircraft, ship instruments, battlefield robots, etc. Military-grade or aerospace-grade MEMS-IMUs have high precision requirements and a wide operating temperature range. Some weapons products require high impact resistance and are smaller in size than fiber and mechanical products.

ADIS16488 inertial measurement unit high precision MEMS-IMU: Acceleration measurement range is relatively wide 1g~5000g, resolution is 0.1mg~1mg, even higher. The range of the gyroscope range is 20°/s~1000°/s wide, and the frequency response is high. It is required to be between 50Hz and 1000Hz, and the zero bias stability is in the range of 1°/h~50°/h. Today MEMS-IMU is moving toward higher integration and higher precision. Among them, the development of MEMS gyroscope is very obvious, and its performance is close to or has reached the level of tactical application; MEMS accelerometer is the most successful commercial marketization, its accuracy has been able to meet the requirements of strategic missile applications, but the current MEMS acceleration The accuracy level of the meter is not very high. MEMS inertial devices still have many problems in structural design, fabrication process, integration, circuit design, packaging and test systems, and need to be further solved. The research hotspots and development directions of MEMS inertial sensors are high precision, strong environmental adaptability and multi-sensor integration. The design of MEMS inertial sensors and the production tools required for manufacturing components are also an important research direction. IMU Introduction The IMU, the inertial measurement unit, is a device that uses an accelerometer and a gyroscope to measure the three-axis attitude angle (or angular rate) and acceleration of an object. In a narrow sense, an IMU is equipped with gyroscopes and accelerometers on three orthogonal axes, a total of six degrees of freedom to measure the angular velocity and acceleration of an object in three dimensions. This is known as the “6-axis IMUâ€; The IMU can be added to the accelerometer and gyroscope to form a "9-axis IMU" that is now known to the public. The accelerometer detects the acceleration signal of the object in the three-axis independent of the carrier coordinate system, and the gyroscope detects the angular velocity signal of the carrier relative to the navigation coordinate system, measures the angular velocity and acceleration of the object in three-dimensional space, and calculates the posture of the object. The core value of IMU in navigation is irreplaceable. In order to improve its reliability, it is also possible to equip each single axis with a wider variety of sensors. In order to ensure the accuracy of measurement, the general IMU should be installed on the center of gravity of the object to be measured.
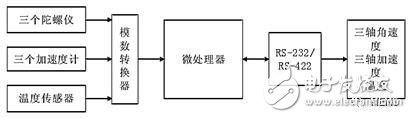
A main principle of IMU principle diagram affecting IMU performance
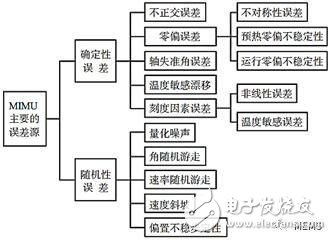
The main error sources of MEMS-IMU are classified into the following four categories: (1) Influencing factors of accelerometers In the IMU, the influence of accelerometers is mainly reflected in the accuracy and stability of accelerometers. . The high precision of the accelerometer is to ensure the accuracy of subsequent data processing. The stability of the accelerometer is a key factor that directly affects whether the IMU can perform its normal performance. Accelerometer accuracy can be measured by 6-position static calibration. After the IMU device is installed, collect the data of the accelerometer in three directions according to the six positions in the figure below.
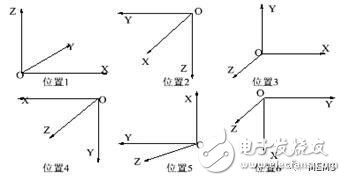
Accelerometer static six position (2) gyroscope influencing factors Gyro impact on the IMU is mainly reflected in its accuracy, its accuracy will directly affect the pros and cons of the attitude solution, in other words, the final IMU can correctly perceive The attitude of the product is based on the accuracy of the gyroscope. The gyroscope error model is similar to the accelerometer. The calibration method is dynamic rotation. The IMU is placed in a single-axis turntable, so that each axis is up and down, and is 50°/s, 100°/s, respectively. Rotate the forward and reverse directions at 150°/s, 200°/s, and 250°/s, and collect enough data.

In addition to accuracy, the dynamic calibration of gyroscopes mainly includes: scale factor (reciprocal with scale factor), scale factor nonlinearity, zero offset, zero offset stability, and zero offset repeatability. These indicator systems reflect the performance of the gyroscope, so it is necessary to test it accordingly and master its specific indicator parameters. (3) Temperature Influencing Factors When the temperature of the MEMS inertial device changes, the accuracy will vary greatly. Under normal circumstances, the working environment of the inertial device may not be a constant temperature environment, especially the accuracy of the gyro is seriously affected, so the temperature The influence can not be ignored. Taking the gyroscope as an example, the inertial device is placed in a constant temperature turntable and the data is collected at different temperatures.

Temperature test of micro-inertial device (4) Main influencing factors after IMU productization A. Low signal-to-noise ratio and low signal-to-noise ratio can cause insensitivity to products using the IMU, so the most difficult problem is noise reduction. In general, this case can utilize wavelet denoising, and denoising the signal is actually a process of suppressing the useless part of the signal and enhancing the useful part of the signal. The commonly used denoising process for inertial devices is: a. Wavelet decomposition of the signal, selecting a suitable wavelet and determining the decomposition level, and then performing decomposition calculation; b. Threshold quantization of the wavelet decomposition high frequency coefficient, high for each decomposition scale The frequency coefficient selects a threshold for soft threshold quantization; c. Wavelet reconstruction, one-dimensional wavelet reconstruction based on the lowest-level low-frequency coefficients of wavelet decomposition and the high-frequency coefficients of each layer decomposition. The most critical of these is how to choose the threshold and perform threshold quantization processing, which is directly related to the quality of signal denoising. B. Large drift / large delay For signal delay problems, MEMS common devices exist, which is very obvious in IMU products. Foreign research institutions have proposed using inertial error rotation modulation technology to solve the delay problem. Inertial error rotary modulation technology is essentially an error self-compensation technology. The use of IMU periodic rotation to complete the modulation of the slow-changing error of the inertial device is an effective method to achieve higher navigation accuracy under the condition of the existing device precision. The structure of the inertial navigation system using error modulation technology has changed. The existence of the rotating mechanism causes the gyroscope and the accelerometer and the carrier to be no longer fixed. However, the solution still uses the strapdown algorithm. Therefore, this inertial navigation system is called rotational modulation. Type strapdown inertial navigation system.
Diesel Gensets,Generator Electric,Generador Electrico,Generator Electric Start
Wuxi Doton Power , https://www.dotonpower.com