The electronic image stabilization combines the technologies of computer, digital image processing and digital signal processing into a new generation of integrated technology for image sequence stabilization. Real-time and accuracy are two important indicators for measuring electronic image stabilization systems. Therefore, the electronic image stabilization algorithm must reflect its superiority and must meet the real-time and accuracy.
1 Electronic image stabilization algorithm based on gray projection
1.1 The basic principle of electronic image stabilization
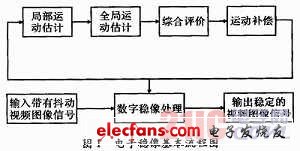
Electronic Image Stabiliza TIon (EIS) is a technology that integrates electronic technology, computer, digital signal processing, video image processing, etc. to achieve digital image sequence stabilization. The most basic of the electronic image stabilization techniques is that the image shift compensation technique is a technique of directly detecting the motion vector of the reference image and the compared image from the image plane and then using an algorithm to compensate. The basic principle of image stabilization: (1) Local motion estimation based on various information of image sequences or video. (2) Perform global motion estimation. (3) After exercise estimation, the exercise parameters are obtained, and then comprehensive evaluation is performed. (4) Perform motion compensation based on the results of the comprehensive evaluation, and finally obtain a stable output sequence. It can be seen that obtaining the global motion vector of the image is a prerequisite for electronic image stabilization. The basic process is shown in Figure 1. The global motion vector can be obtained by a gray projection algorithm.
1.2 Gray projection algorithm
The gray-scale projection algorithm (ProjecTIon Algorithm, PA) is to obtain the motion vector between images by using the characteristics of the gray-scale distribution of the image. For images with rich gray details, no obvious features of histogram, and poor contrast, it is difficult to identify the feature quantity. Finding the feature quantity can not only ensure the required image stabilization accuracy, but also difficult to meet the real-time requirements of image stabilization. For this kind of image sequence, the gray motion projection method is used to realize the accurate acquisition of the image motion vector, so as to achieve the purpose of stabilizing the image sequence. The video image sequence is an image sequence in which the gray level of the image changes, and various motion vector estimation algorithms are based on gray scale changes. The projection algorithm can make full use of the grayscale variation of the image to estimate the motion vector of the image more accurately. The advantage of this algorithm is that the gray curve matching speed is fast, thereby improving the image stabilization speed, and is suitable for the gray level change caused by the change of the image illumination. The gray projection algorithm is an ideal algorithm for realizing electronic image stabilization of image sequences with only translational motion or rotational motion.
(1) Grayscale mapping.
Gray-scale mapping is to map the initial two-dimensional image information input into each frame into two independent one-dimensional waveforms. The following is a mapping method for column projection.
In equations (1) to (3), Colk(j) is the gray value of the jth column of the kth frame image; Curk(i,j) is the pixel value at the (i,j) position on the kth frame image. ; NC is the number of columns, and ColProjk(j) is the corrected projection value of the jth column of the kth frame image. The algorithm of row-direction gray-scale projection mapping can be similarly introduced.
(2) Projection filtering.
Projection filtering is to reduce the amplitude of the boundary information, preserve the amplitude of the intermediate region, and use a filter to filter. Since the edge information adversely affects the peak of the cross-correlation in the cross-correlation calculation, the projection value at the boundary is removed. Since the edge information is unique on each image when the amount of image movement is large, the accuracy of the algorithm can be improved by filtering the projection values.
(3) Cross-correlation operation.
The cross-correlation operation is to cross-correlate the row and column projection curves of the current frame image with the row and column projection curves of the reference frame image. The only peak in the correlation value curve obtained after the operation is the displacement value obtained by compensating the motion vector. After the displacement vectors in the horizontal direction and the vertical direction are obtained, the current image is translated to the pixel distance of the corresponding size in the opposite direction of the displacement vector, thereby realizing the stability of the image sequence. The row and column correlation operations are calculated as shown in equation (4).

In equation (4), Colk(j) is the grayscale projection value of the jth column of the kth frame image; NC is the length of the column; m is the search width of the displacement vector on one side with respect to the reference frame. Let wmin be the value of w when w(w) is the smallest, and the displacement vector of the kth frame image in the vertical direction with respect to the reference frame image is as shown in the formula (5).
After the displacement vectors in the horizontal direction and the vertical direction are obtained, the current image can be moved in the opposite direction of the displacement vector to respond to the pixel distance of the size, thereby realizing the stability of the image sequence.
Fingerprint Lock Motor introduction:
Basic security work, lock body responsible for the security door lock body responsible for opening and closing lock, the lock body Lock Motor is of crucial importance.
Functions: it is widely used in various intelligent locks, such as Shared bicycle lock, fingerprint lock, glass lock, safe lock, hotel lock, family lock, inductive smart lock, etc
Features:Fingerprint Lock Motoris based on micro precision reducer development, small intelligent micro precision reducer can do 10 mm in diameter, is widely used in safe, locks, smart locks, sensor intelligent lock;
This kind of motor has the characteristics of low noise, low energy consumption, small volume, light quality, high precision, large torque and durability
Method of use: the best stable in horizontal plane, installed on the Fingerprint Lock Motoroutput shaft parts, cannot use a hammer to knock, knock prone to press into the dc Fingerprint Lock Motor drive, may cause damage to internal components, and cannot be used in the case of blocked.

Operating temperature range:
lock motor should be used at a temperature of -10~60℃.
The figures stated in the catalog specifications are based on use at ordinary room temperature catalog specifications re based on use at ordinary room temperature (approximately20~25℃.
If a lock motor is used outside the prescribed temperature range,the grease on the gearhead area will become unable to function normally and the motor will become unable to start.Depending on the temperature conditions ,it may be possible to deal with them by changing the grease of the motor's parts.Please feel free to consult with us about this.
Storage temperature range:
Fingerprint Lock Motor should be stored ta a temperature of -15~65℃.
In case of storage outside this range,the grease on the gearhead area will become unable to function normally and the motor will become unable to start.
Service life:
The longevity of Fingerprint Lock Motor is greatly affected by the load conditions , the mode of operation,the environment of use ,etc.Therefore,it is necessary to check the conditions under which the product will actually be used .The following conditions will have a negative effect on longevity.Please consult with us should any of them apply.
â—Use with a load that exceeds the rated torque
â—Frequent starting
â—Momentary reversals of turning direction
â—Impact loads
â—Long-term continuous operation
â—Forced turning using the output shaft
â—Use in which the permitted overhang load or the permitted thrust load is exceeded
â—A pulse drive ,e.g.,a short break,counter electromotive force,PWM control
â—Use of a voltage that is nonstandard as regards the rated voltage
â—Use outside the prescribed temperature or relative-humidity range,or in a special environment.
â—Please consult with us about these or any other conditions of use that may apply,so that we can be sure that you select the most appropriate model.
when it come to volume production,we're a major player as well .each month,we rurn out 600000 units,all of which are compliant with the rohs directive.Have any questions or special needed, please contact us, we have the engineer group and best sales department to service to you
Looking forward to your inquiry. Welcome to our factory.

Fingerprint Lock Motor,Motor For Fingerprint Lock,Gear Motor For Fingerprint Lock,Dc Motor For Fingerprint Lock
Shenzhen Shunchang Motor Co., LTD. , https://www.scgearmotor.com